What is Edge Processing and its Role in Video Telematics?
When I first read the term “Edge Processing” I will admit that I did not even try to comprehend what it meant. It comes off as a highly technical term that is for the engineers to know and me to benefit from. However, understanding the basics of edge processing helps a lot with understanding our future roadmap in connectivity as well.
In its simplest form, edge processing is a method for IOT (internet of things) devices to process data that it collects. These devices can be anything that collects data. Vehicles contain a plethora of these devices—just think of all the data being collected every second the car is turned on, especially now with innovative assisted driving technologies. Let us focus on one example to explore edge processing and other ways to process data.
Lane Assist Technology & Edge Processing
Lane assist technology is a great and innovative feature that monitors the cars position on the road and detects if a driver is unintentionally leaving their lane. This is especially helpful for fleet drivers who log lots of hours on the road and can be vulnerable to drifting from fatigue or distraction while driving. But how does the car do this?
At its core, a camera is placed in the windshield of a car and picks up the lane markings—the white or yellow lines contrasted by the dark surface of the road. Should the car start getting too close to these lines without having their turn signal on, an alarm of some sort (beep, visual, vibrating wheel, etc.) will trigger and if the driver fails to correct the car’s position, the vehicle will re-center the car on its own.
To do this, data is constantly being collected and processed in real time. There are two main ways that vehicles make this happen: cloud processing and edge processing.
Cloud Processing-
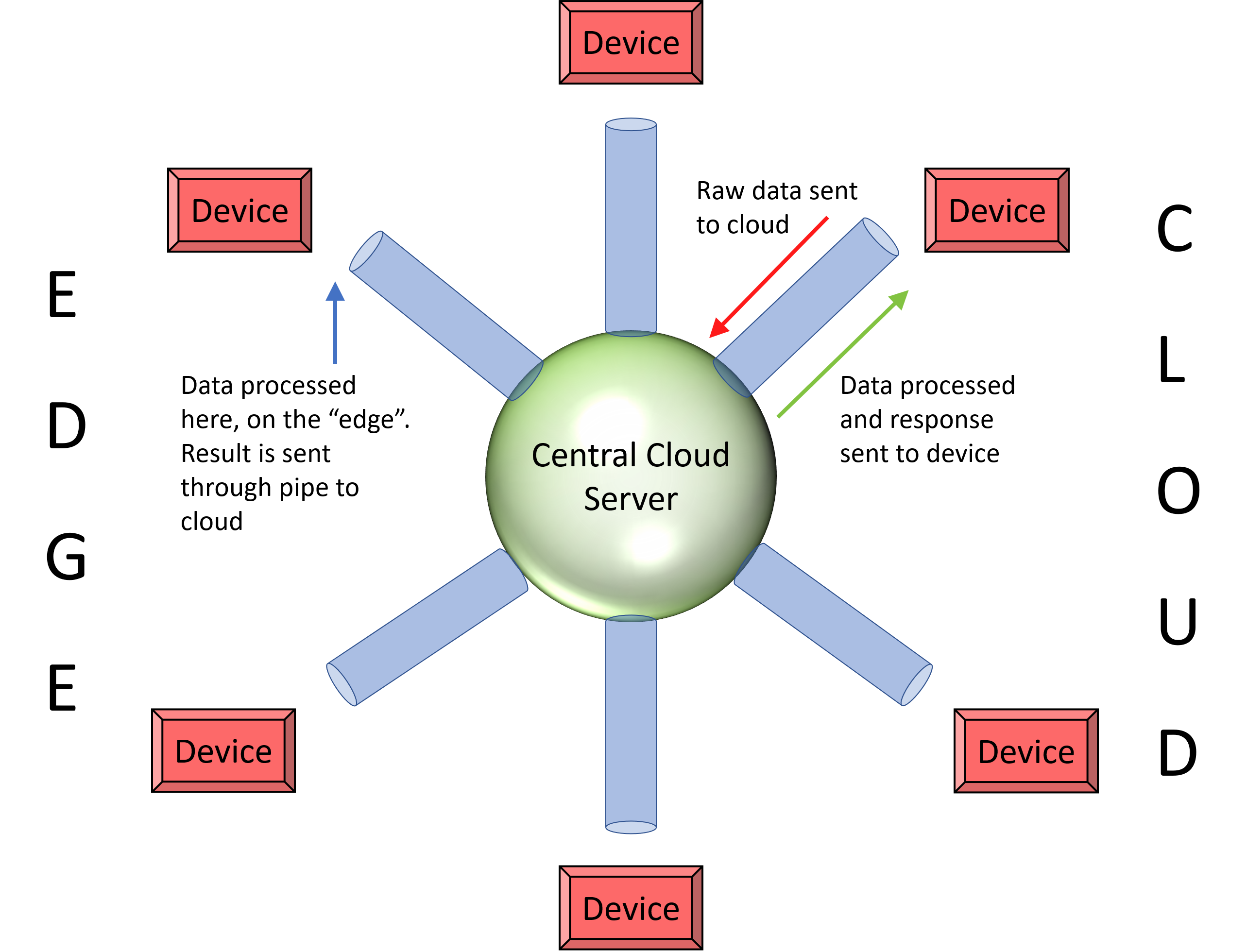
The way cloud processing works is that the device collects the data (in this case the camera collecting the footage it sees on the road) and sends it to a cloud processing server that then executes the processing and sends back any action items if necessary (alerting the driver they are drifting).
Edge Processing-
Using edge processing, the device would handle the processing right there at the device level and only send a result signal to the cloud. So instead of sending the footage to the cloud, a message saying “good position” or “alerted” would be sent to the server. This is mostly for logging purposes so people can look back on what happened. In all, the data is processed on the “edge” instead of at a central cloud server.
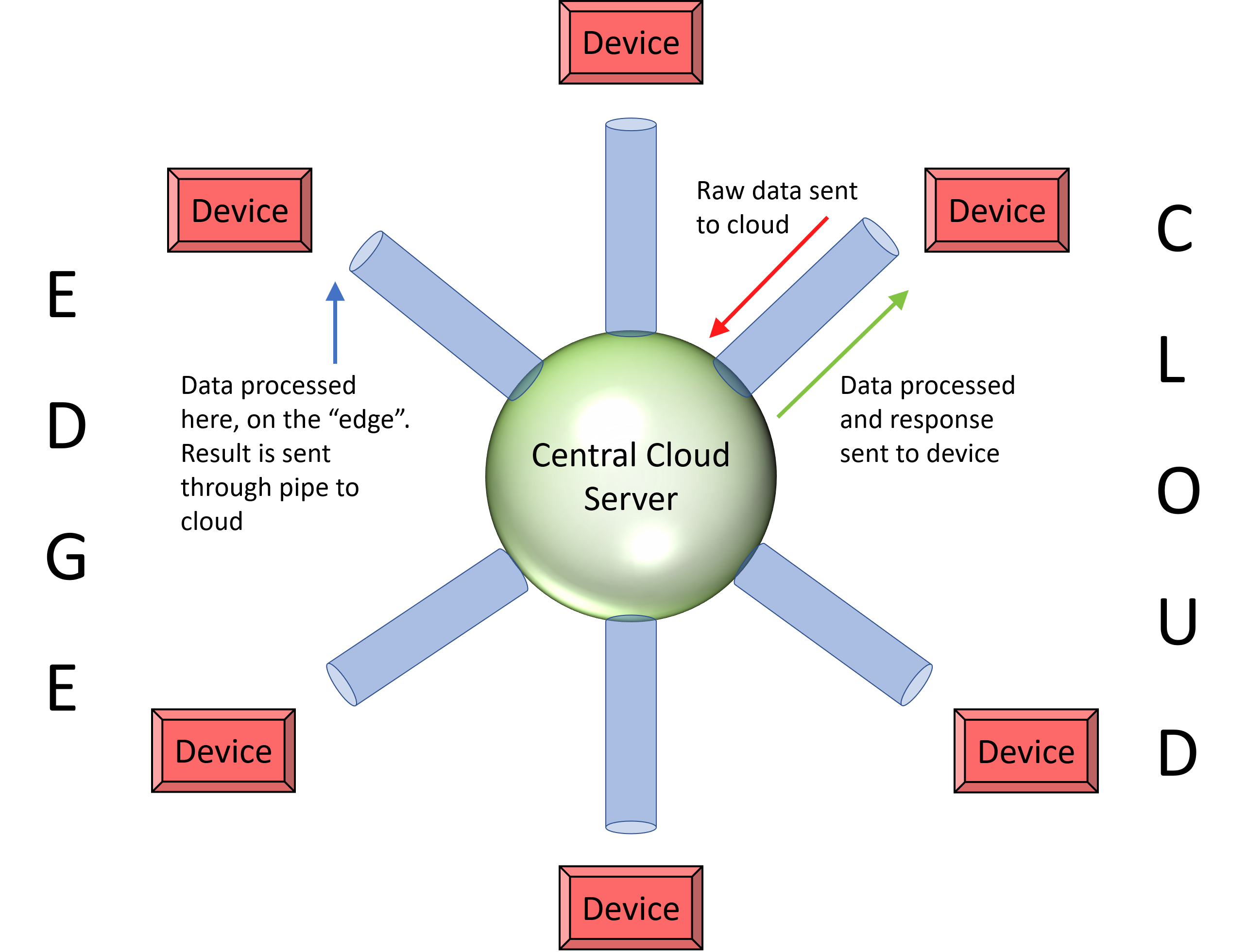
To imagine this concept, refer to the figure above. All the pipes/tunnels are connections from the different devices and the nucleus is the cloud server. Handling data on the edge is like going to the very edge of each pipe and putting a processor there, which means in the device. The data no longer needs to travel through the pipe and back for an action to be taken.
Cloud vs. Edge Processing
Both cloud and edge processing have different advantages and disadvantages.
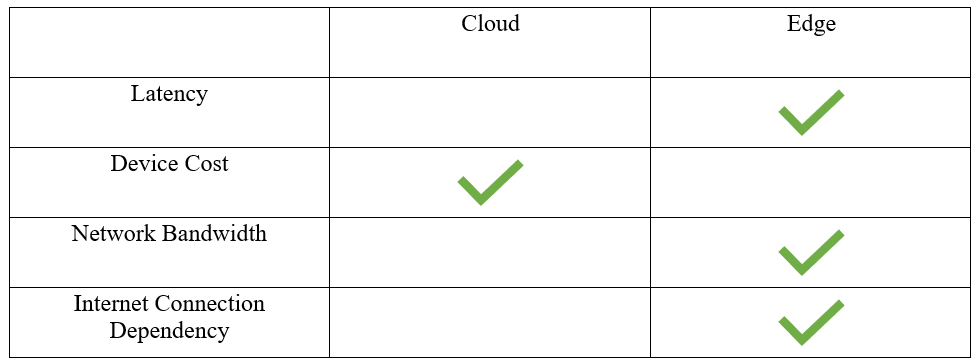
Latency: Edge processing allows for data to be processed much faster. Normal cloud computing will take 200 milliseconds for the data to travel to the server, amounting to a roughly one fifth of a second latency period (event to response time). In our lane assist example, that can be life or death. In that time the car can be well into the other lane and potentially crashing into another vehicle. Edge processing takes less than 10 milliseconds to respond to an event, allowing for real time responses in critical situations like our example.
Device Cost: Devices that use edge processing will cost more than cloud computing devices since they need to capabilities to process data within itself. Because of this, cloud computing can be advantages for noncritical functions that are not affected by delayed response times. Examples of this can be in car entertainment.
Network Bandwidth: Edge processing is not only fast, but it also vastly reduces the amount of data sent to the cloud server, which ultimately saves on storage and costs. For our example, using cloud computing would mean sending raw images of 1000KB+ size constantly. Most of these images would be insignificant but would take up a very large amount of storage and cost a lot to store and handle. Edge computing sends a result message of only a few bytes, saving both storage and resulting costs from it.
Internet Connection Dependency: For cloud computing to function, it needs stable connection to the internet. However, roads are not always in areas of good service. But we still need to keep drivers safe regardless of service or not. Edge processing does not solely depend on the internet connection as it can process the data without the need for the cloud server. So, lane assist would still be able to work using edge processing.
Taking this into consideration, devices can be optimized to save money without costing performance. For solutions such as Positioning Universal’s AI Fleet Camera Solution, edge processing is utilized to produce real time results that can have life saving impacts on their drivers. By utilizing edge processing, every alert triggered can instantly go to the driver and help them avoid potentially dangerous situations. Likewise, this allows for minimal storage as the device can dictate what needs to be recorded and uploaded to the cloud based on whether the event is a “critical event” or not. We have all seen the skits of security guards skimming through hours of security footage to find what they are looking for, but with edge processing, the AI Fleet Camera Solution allows fleet managers the ability to skip the unwanted footage and have cloud access to important events in high resolution video.
Edge Processing and 5G
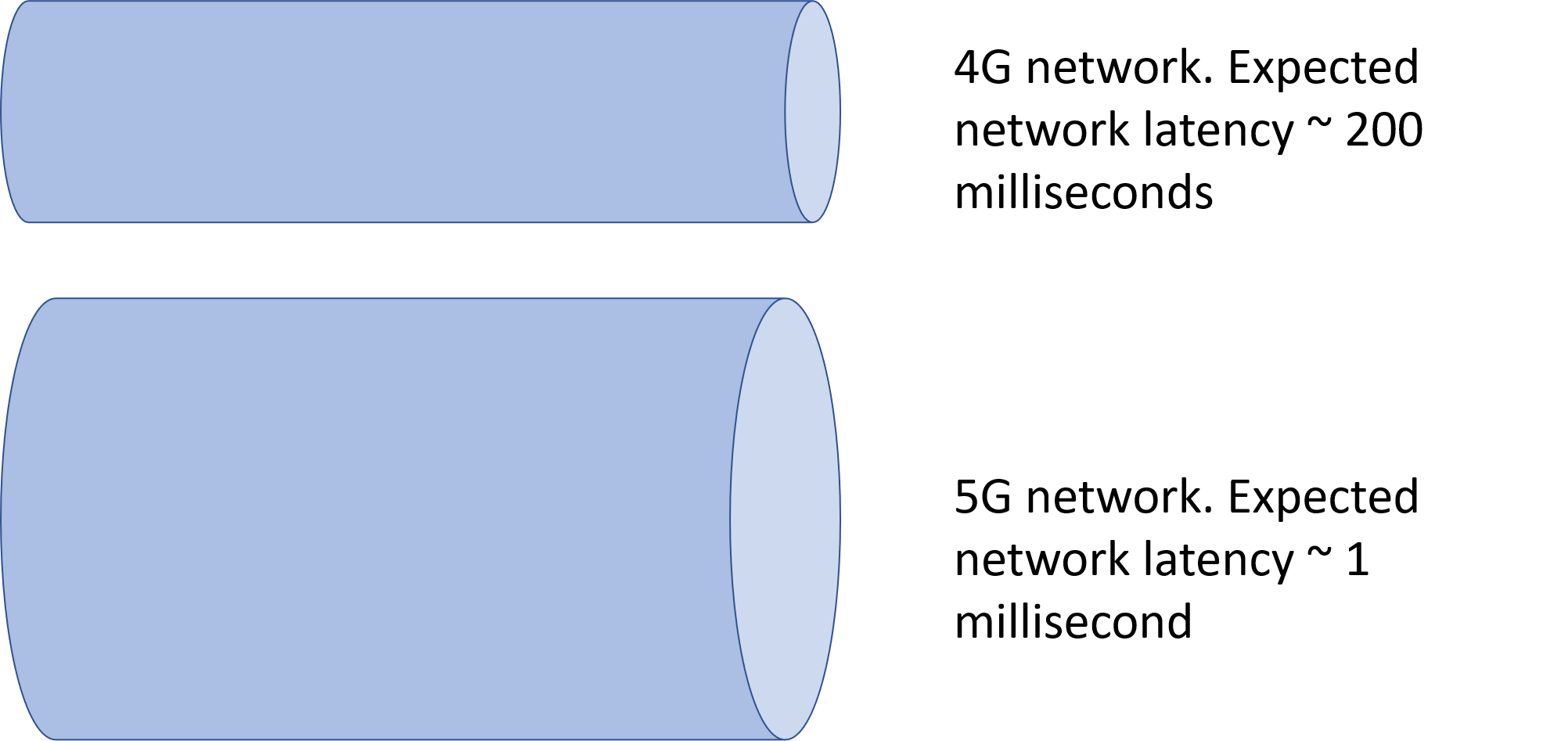
While edge processing right now means more expensive parts for the device, the future looks to mitigate that and lower latency even further. Right now, edge processing is used with 4G technologies as 5G is still being fully fleshed out, especially in the vehicle telematics world.
To visualize what this means, lets zoom into our initial pipe and nucleus diagram. 5G and 4G in cloud computing describe how fast the data can travel through each pipe (with 5G being a much faster method). However, the actual data does not necessarily move faster, but rather the pipe is like a freeway for the data, and the data now has more lanes on the freeway with 5G.
Since 5G is not fully accessible yet, edge processing allows similar speeds to 5G while still operating under the 4G atmosphere. But we still have the problem with the more expensive hardware. Likewise, when 5G does become fully accessible, it also has non-latency related flaws that edge computing solves (network bandwidth and no-coverage areas). So, the future of IOT data processing actually involves a merging of both technologies.
5G widens the pipe for data to move faster, and edge processing shortens the pipe so the data needs to travel less distance. The future of 5G is merging both aspects into one system. Instead of adopting hardware into the device itself, edge-processing servers will be installed locally to vastly decrease the distance the data needs to travel. In our example of vehicle telematics, local servers will be placed alongside roads just like normal cell towers. From there the data will be processed and the action items sent back to the device while also sending the result and any other relevant data to the main cloud server.
It is the best of both worlds. Only minimal and significant data will be uploaded to the cloud, everything will be done faster, and device cost will be lowered. Utilizing both edge and 5G cloud computing will unlock even more capabilities while also driving costs down. For drivers and fleets as a whole, that means less collisions and safer roads.
Related posts

Distracted Driving: Impacts and Solutions for the Leading Threat in Road Accidents
In today’s age of mobile technology, distracted driving has surpassed drunk dr

6 Tips on Achieving Driver Buy-in for AI Dash Cameras
AI dashboard cameras are proven to be extremely effective at not only reducing c
Unleashing the Sun’s Power: Enhancing Efficiency and Security with Solar-Powered Asset Trackers for Construction Equipment Monitoring
Introduction to Solar-Powered Asset Trackers Solar-powered devices are increa
Leave a Reply