Navigating the Future of Telematics: Unveiling the Power of Inertial Measurement Units (IMUs)
As the telematics technology landscape evolves, Inertial Measurement Units (IMUs) have emerged as a core technology, powering advanced vehicle tracking, enhancing driver safety, and offering valuable accident prevention insights. In this dynamic market, Positioning Universal’s technical expertise serves as a trusted guide, helping companies identify the most suitable IMU solution tailored to their operational needs.
Background
IMUs are sensor systems designed to measure linear acceleration (velocity) and force through accelerometers, angular velocity (orientation) using gyroscopes, and gravitational forces (magnetic field strength and direction) with magnetometers. IMUs within IoT devices provide the following capabilities:
- Identifying poor driving habits, such as aggressive turns, harsh braking, and rapid accelerations
- Detecting accidents and determining severity
- Enhancing location accuracy and continuity
- Optimizing battery life by transitioning the device into power-saving mode when stationary
GPS devices have 3 types of IMUs as shown in the chart below:
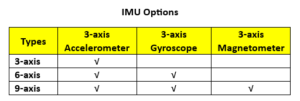
3-axis: three individual sensors are mounted into a cluster known as a triad to provide three-dimensional measurement. A 3-axis IMU is a cost-effective, energy-efficient choice designed for applications that require basic motion sensing without the need for advanced orientation tracking or magnetic field awareness. The 3-axis IMU is also best suited for smaller form factor devices which need longer battery life.
6-axis: adds a gyroscope 3-axis gyroscope which is used for applications where advanced motion sensing (orientation) is critical. Motion sensing improves the monitoring of driving behavior, provides more reliable and continuous location information especially in challenging environments like urban canyons and tunnels, and reduces orientation drift1 over time.
9-axis: adds a magnetometer which is used for applications where magnetic field awareness is required. Magnetic awareness provides more precise tracking position estimates, improves the accuracy of dead reckoning2 estimates, increases the data set available to evaluate accidents, and optimizes route planning services.
1 Drift is the gradual accumulation of errors in orientation estimation due to sensor inaccuracies
2 Dead reckoning provides position estimates when GPS is unavailable
With a deep understanding of IoT technologies, Positioning Universal guides companies in selecting the most suitable IMU solution for their needs. By leveraging our expertise, companies can optimize device functionality, ensure accurate data, and enhance performance within their telematics solutions. This empowers businesses with the invaluable business intelligence needed to maintain a competitive edge in rapidly evolving markets.

Source: Advanced Navigation